ROBOTIC 3D IDENTIFICATION

in a heterogeneous flow

parts identification?
- Guarantees robust identification of parts by their geometry, even in difficult environments (foundry, forge, oily environment).
- Guarantees precise location according to the identified part.
- Guarantees production speed in-line and despite this sorting problem.
The complete process
Implementing the identification solution requires the prior creation of a database of surface files of the parts to be identified.
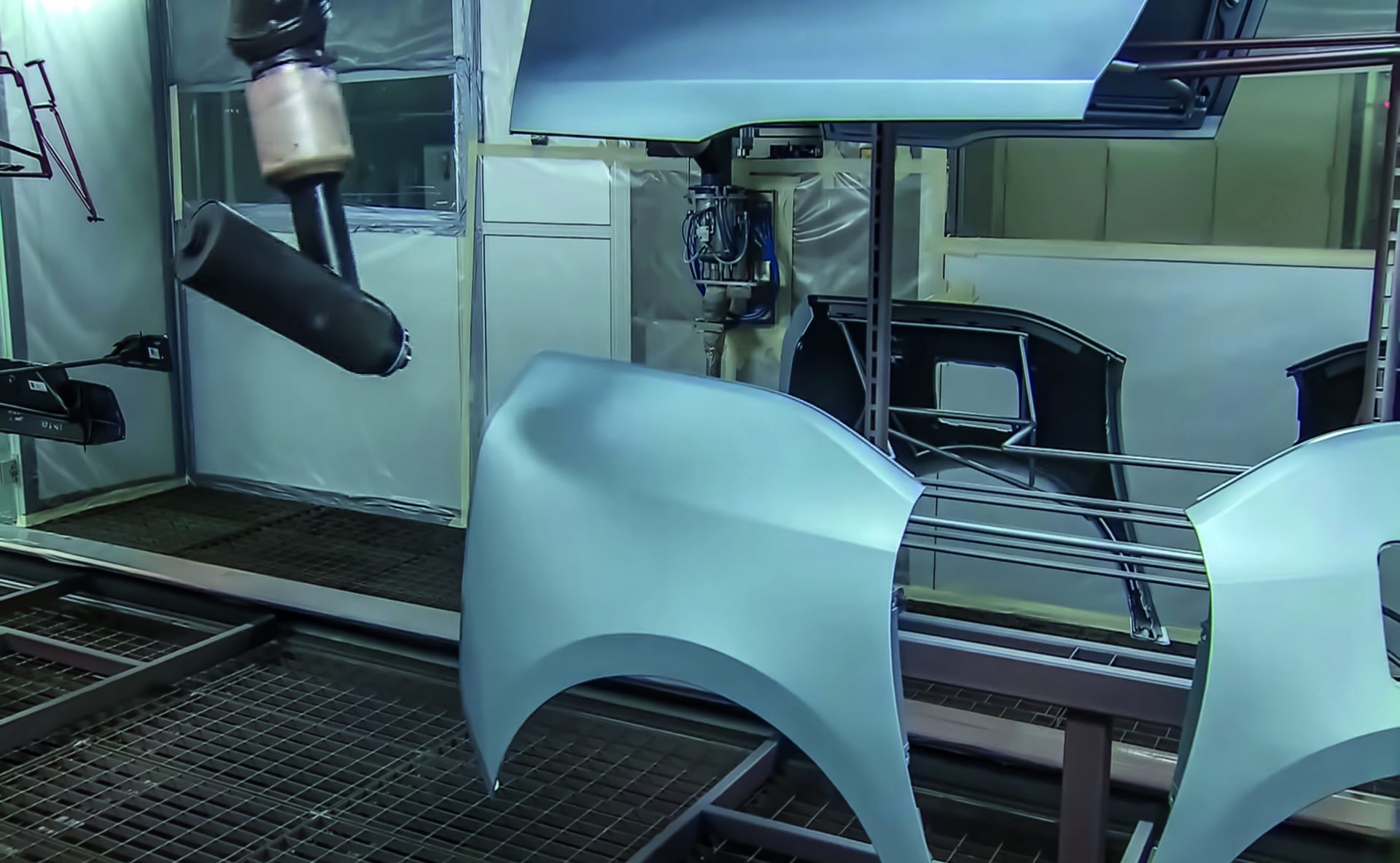
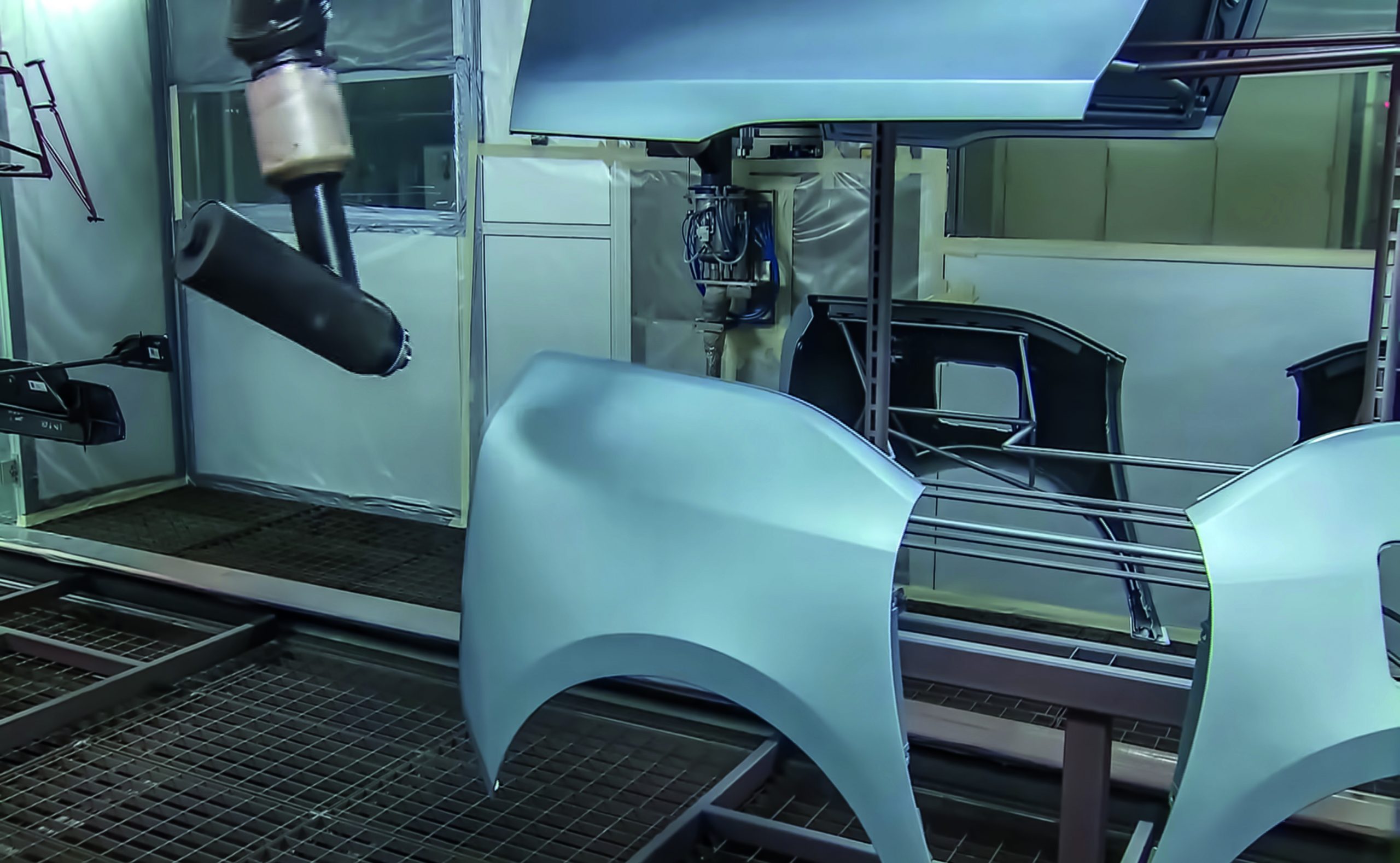
Typical example of an identification requirement: identification of parts on a robotized paint line. The image processing software enables the painting robot to select the appropriate painting program according to the part reference received from the Visionerf solution.
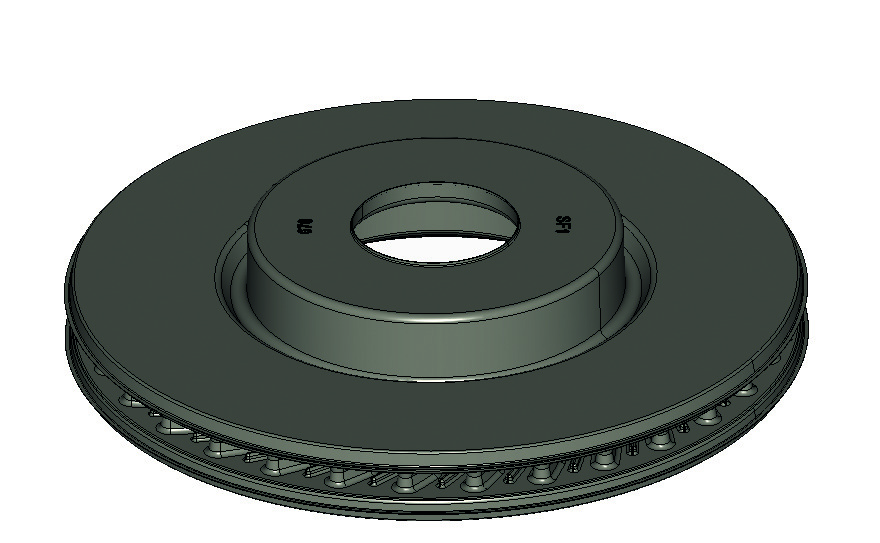
1. CREATION OF A DATABASE.
From STEP models
Intuitive interface for loading all surface models into the database. Up to several hundred references can be managed in a single program.
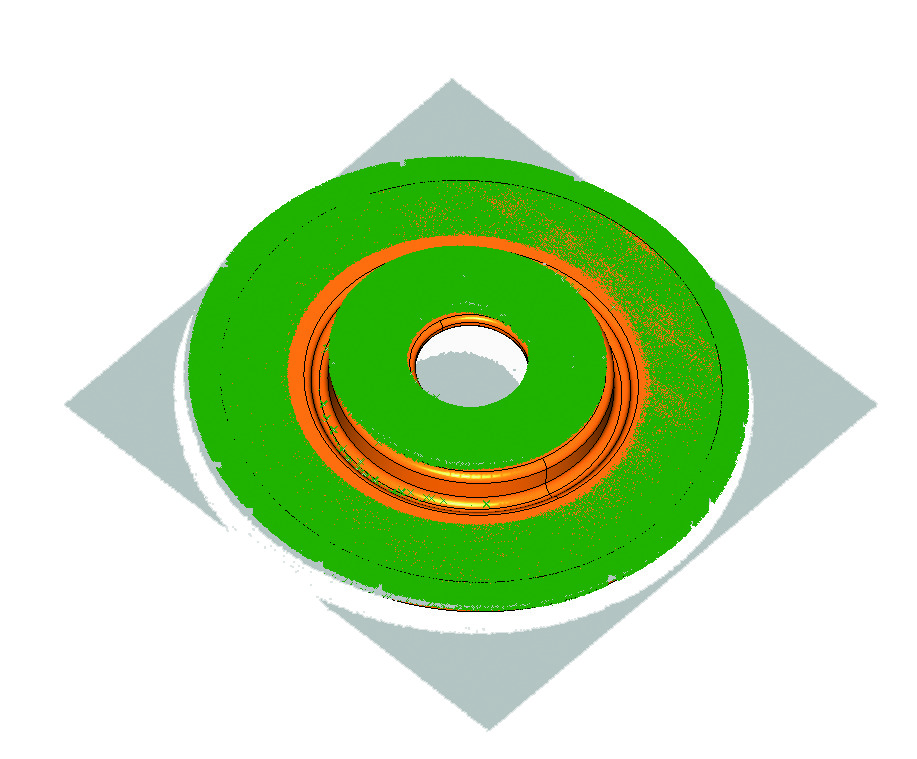
2. DIGITIZATION
From real to virtual
The Cirrus3D camera digitizes the actual work scene in the form of a 3D cloud of points. The sensor uses stereovision technology for data acquisition, ensuring the quality of the information contained in the scan for maximum performance in scanning results. The user can graphically define the parameters of the working scene: working volume, density of points contained in the point cloud.
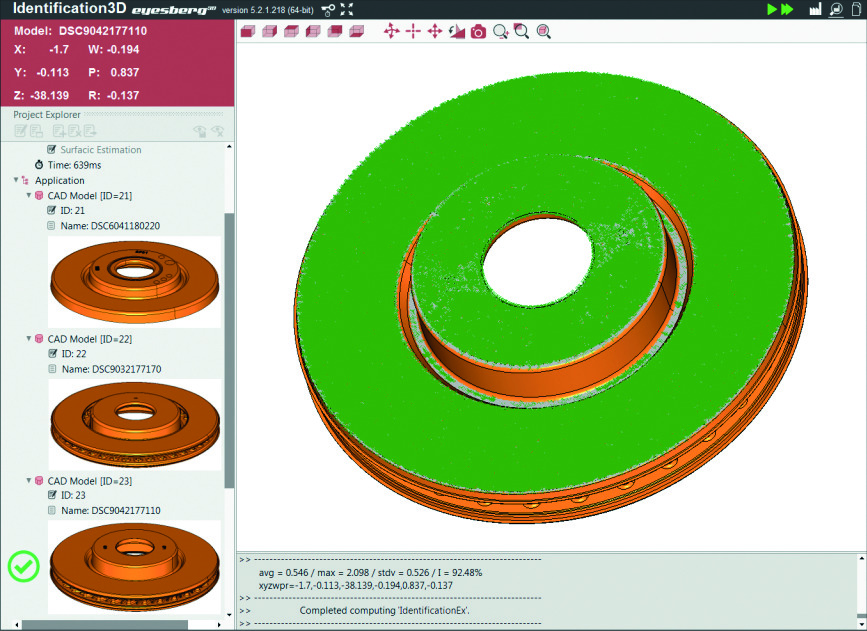
3. AUTOMATIC IDENTIFICATION
of the part
The cloud of points is analyzed by the image processing software to identify the current part in the process flow. Part characteristics are tested through the software to find the correspondence between the acquired point cloud and a CAD model of a known part.
4. LOCALIZATION
From virtual to real
Sends information on the identified part and its spatial coordinates to the line's operating system (PLC, robot, etc.).
If required, the image processing software can take over the calculation of the robot trajectory in an optimal way, whatever its make. It transmits the angular positions of each axis to the robot controller, taking into account any singularities.
As a result, robot applications are easier to develop, and integration time is considerably reduced. Simplified, this results in a less time-consuming integration combined with higher productivity, thus a faster ROI.


Why
Since the first-generation Cirrus3D camera was launched in 2015, Visionerf has constantly improved its products to provide customers with a high-end scanner capable of operating in the harshest environments, such as foundries or dusty, humid environments.
The unique design of this camera, based on the principle of high-resolution stereoscopy, enables very small elements to be viewed with the utmost precision in the shortest possible time. Combined with powerful structured light, the quality of information remains constant across a wide range of materials. From black to high-gloss, measurement reliability remains flawless.
The choice of top-of-the-range components contributes greatly to the robustness and reliability of our products.
Today, our cameras are used in all sectors of activity, for precise handling of parts of all sizes (screws, mechanical bodywork parts), for robot guidance in high-volume applications (from automatic detection of potential gas leaks on refrigerators to automatic changeover of drilling tools on giant tunnel boring machines), and for monitoring and inspecting objects directly on production lines.
Discover our solutions



