Customer
cases
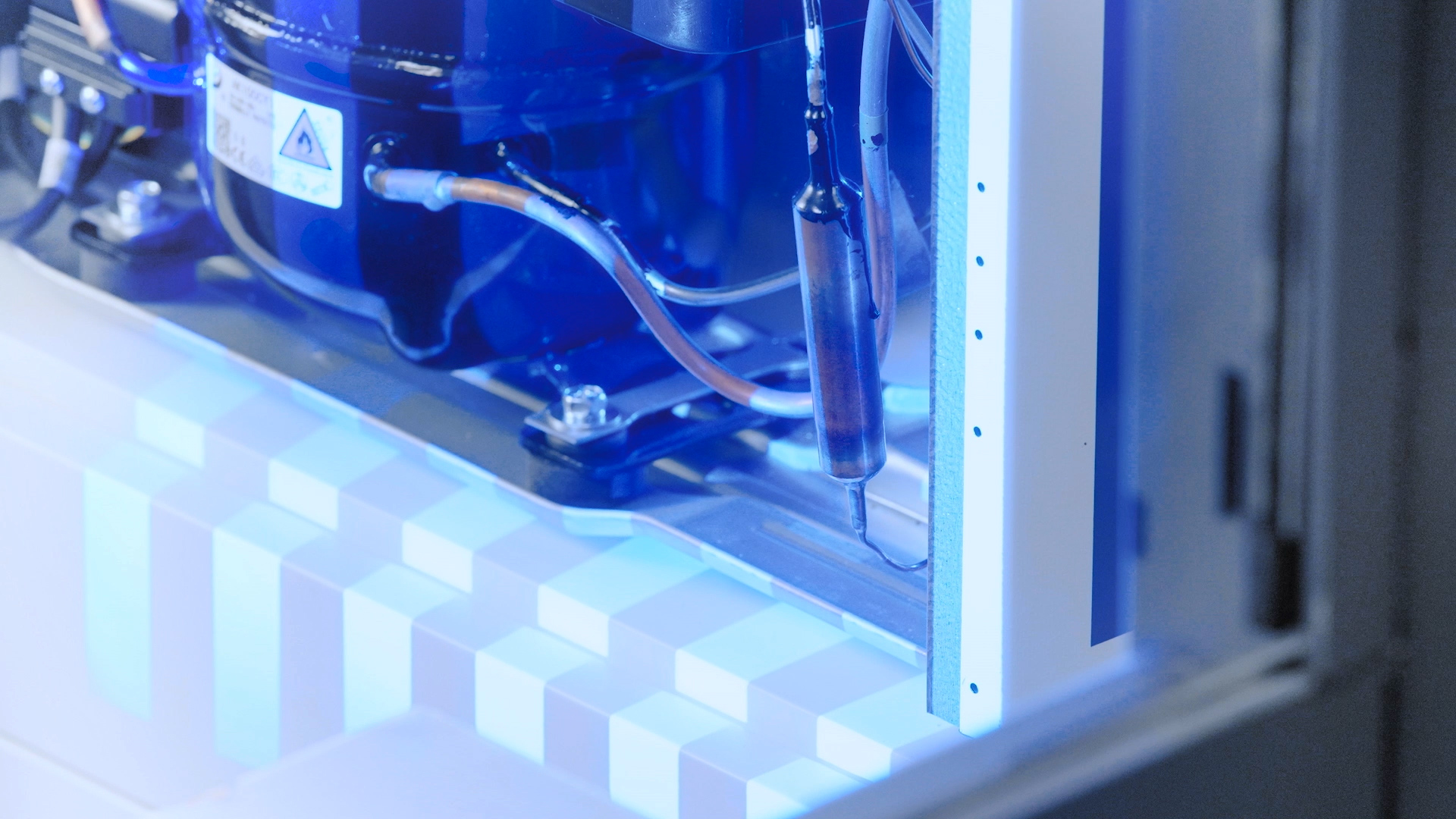
Leakproof thanks to the Cirrus 3D camera: A success story for Inficon
Inficon | Industry
Inficon is a leading global provider of innovative instrumentation, technology and software that are essential for gas leak detection in air conditioning / refrigeration

How Visionerf helped Pattyn with their Vision challenges
Pattyn France | Machine manufacturing
Pattyn France is part of the Pattyn Group, a group focusing on bag-in-box packaging solutions. The French chapter, based in Savignac, primarily focusses on providing pack

Sorting parts on a conveyor
Stellantis | Automotive, Industry
Our customer, the Sept-Fons site of the STELLANTIS group - a foundry specializing in the manufacture of cast iron automotive parts such as cylinder housings

Bin picking in hidden time
Renault | Automotive, Industry
Renault's Cleon plant puts its trust in Cirrus3D technology. A factory serving the Renault-Nissan Alliance, Cléon has 35 customer sites worldwide.
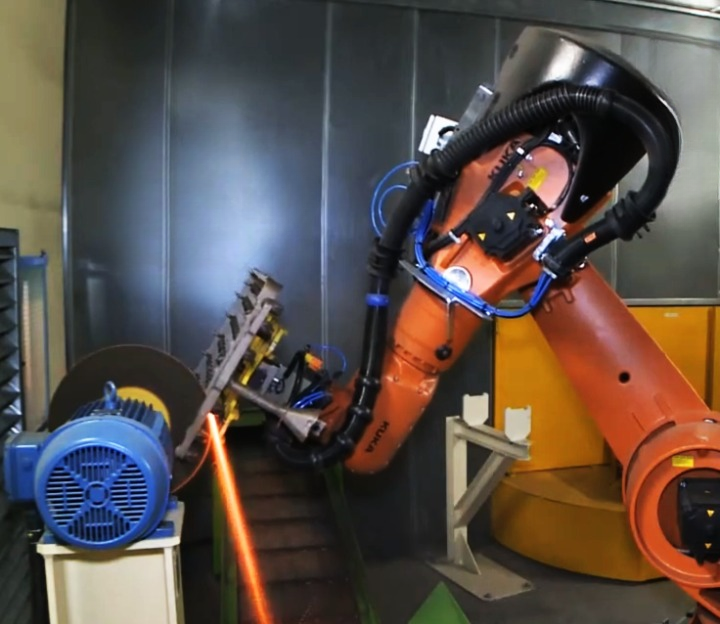
Robot-guided finishing
Cronite | Industry
The part is loaded into the cell via a turntable without mechanical referencing. It is then scanned and localized using a 3D scanner.

Robotic leak detection
Inficon | Industry
Inficon, a leading provider of gas analysis and leak detection solutions, has teamed up with Visionerf to create an innovative leak detection system.